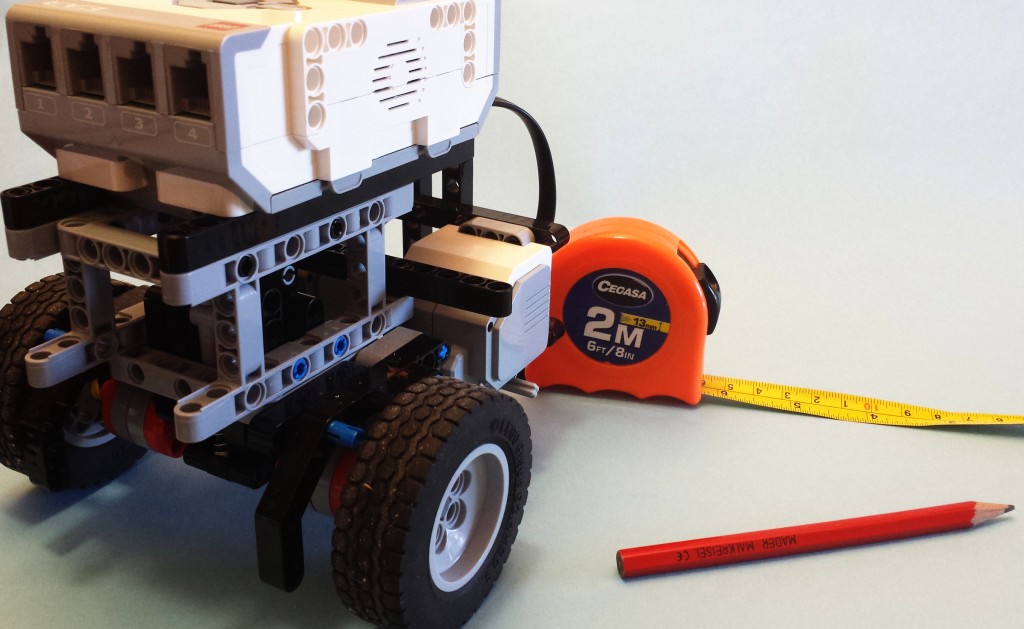
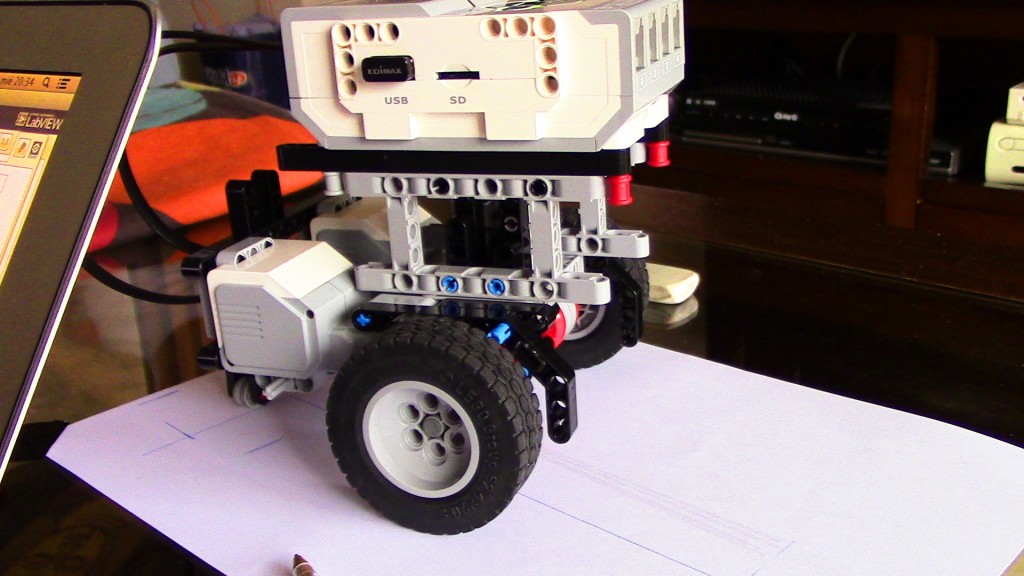
What happens when a Robot has different size wheels?
This article is another spin-off of the Differential-drive robot calibration. If you remember the article at the end you found that wheels are most of the times of different sizes with differences of around 0.01% but that are big enough to affect movement over 1 meter. So… What happens when you move one meter straight […]
What happens when a Robot has different size wheels? Read More »